Glossary of common terms and concepts used in website and documentation.
ACCR (Automatic Container Code Recognition), ACNR (Automatic Container Number Recognition)
— a technology for freight container ISO 6346 international standard identification numbers recognition, uses streaming video or static images as a data source. Used in the INTLAB CONTAINER SDK.
ANPR (Automatic Number-Plate Recognition)
ALPR (Automatic License-Plate Reader), AVI (Automatic Vehicle Identification)
— a technology that uses OCR (Optical Character Read) system to “read” vehicle number plates information by various video surveillance systems. It is widely used around the world in order to ensure order and law, for car registration checking, preventing crimes, automatic charging and general traffic control tasks.
API (Application Programming Interface)
— a data set containing functions signatures and data structures definitions, object classes, protocols and shared methods for software development, i.e. a set of strictly defined ways of interaction between different software components. Well-designed API facilitates software development process, providing software developers with all necessary tools to implement specific functional requirements according to interface used. APIs can be provided by web applications, OS or firmware components, database management systems and various software libraries.
Artificial intelligence
Artificial intelligence is intelligence exhibited by machines. In computer science, the field of AI research defines itself as the study of "intelligent agents": any device that perceives its environment and takes actions that maximize its chance of success at some goal. Colloquially, the term "artificial intelligence" is applied when a machine mimics "cognitive" functions that humans associate with other human minds, such as "learning" and "problem solving".
CCTV (Closed Circuit Television), VSS (Video Surveillance System)
- closed circuit television system which transmits video stream to a strictly pre-defined group of “recipients”, such as: staff members, software and hardware systems (both digital and analog), for video data processing and long-term storage. Computer networks of all kinds, being a convenient and fast transport for digital video signal, make it possible to eliminate distance limits between data “source” and “target” in CCTV systems, providing various signal interception protection mechanism (signal encoding and incompleteness, mandatory authentication mechanism).
Computer vision
Computer vision is the science that aims to give a similar, if not better, capability to a machine or computer. Computer vision is concerned with the automatic extraction, analysis and understanding of useful information from a single image or a sequence of images.
Deep learning
Deep learning is the application to learning tasks of artificial neural networks (ANNs) that contain more than one hidden layer. Now deep learning is part of state-of-the-art systems in various disciplines, particularly computer vision and automatic speech recognition (ASR).
Digital image processing
Digital image processing is the information processing procedure which accepts digital images as input data. The purpose of the procedure could be either source image modifications (post-processing, quality enhancement, distortion elimination or gamma correction) or content data analysis (text-, character- or pattern recognition, object detection).
INTLAB RECOGNITION ENGINES
— SDK family for optical objects recognition, developed by Intlab company, including the following software packages: INTLAB AUTO LPR, INTLAB AUTO MMR, INTLAB WAGON, INTLAB COACH, INTLAB UIC and INTLAB CONTAINER.
INTLAB AUTO LPR
— SDK which utilizes the ANPR technology designed for number-plate recognition system integration.
INTLAB AUTO MMR
— SDK for integration of the optical make and model recognition function, based on MMR technology.
INTLAB WAGON
— SDK for 8-digit numbers optical recognition function integration. These numbers should satisfy CIS countries standard and be applied to locomotives, railway platforms, tanks and freight carriages with 1520 mm gauge.
INTLAB COACH
— SDK for 8-digit 2-line numbers optical recognition function integration. These numbers should satisfy CIS countries standard and be applied to passenger and mail carriages with 1520 mm gauge.
INTLAB UIC
— SDK for integration of the optical numbers recognition function. These numbers should satisfy UIC (Union Internationale des Chemins de fer fr) standard and be applied to locomotives, railway freight carriages, tanks and platforms with 1435 mm gauge.
INTLAB CONTAINER
— SDK for integration of the horizontal and vertical identification numbers recognition function that uses the ACCR technology. Numbers should be applied to freight containers according to the ISO 6346 standard.
ITS
— a transport infrastructure management system which uses information, communication and telematics technologies to provide optimal solutions in a field of traffic flow management - maximize safety and mobility indicators as well as interaction efficiency among the traffic participants. European Commission Directive 2010/40/EU of July 7, 2010 refers the “ITS” term to the road transportation systems, however, does not restrict its usage with reference to other kinds of such systems.
Valid ITS components are:
- The Rules of the Road automatic violations recording system,
- traffic lights control,
- real-time traffic monitoring system,
- traffic participants informing procedures about road conditions, public transport schedules, vacant parking spaces, etc.
- GPS system;
Machine learning
— a class of Artificial Intelligent technologies that studies various algorithms constructing methods, that can be trained within one of the directions:
-inductive (learn by precedents) is based on the identification of common regularities according to particular empirical data
-deductive learning involves experts knowledge formalization and their transfer to a computer system as a knowledge base
Since deductive knowledge is usually referred to the expert systems area, the “machine learning” and “learning by precedents” terms can be considered synonyms.
Machine learning methods tightly connected with Data Mining procedures and in use, in particular, in the areas of optical character recognition, ranking training and computer vision.
MMR (Make and Model Recognition)
— a process of the most accurate vehicle make and model determination using images, obtained with ANPR technology while the best results can be achieved with at least two vehicle image projections. Basic vehicle type classification also is a part of this process.
ANN (Artificial Neural Network)
— a conjunction of mathematical model and its software and hardware implementation built on the principle of biological neural networks organization and functioning - nerve cells of a living organism. ANN implementation is usually a system of interacting simple processors (artificial neurons) performing atomic operations. ANNs are used for practical purposes: forecasting, control and objects recognition problems.
Object classification
— the process of assigning semantic tags to various objects. This is one of the fundamental problems in the field of computer vision and initial stage for the process of object detection, recognition and semantic image analysis.
Object detection
— a technology based on computer vision and digital image processing which performs semantic source data analysis in order to detect object instances of a certain class (people, road or railway objects) with maximum accuracy and self-learning ability.
Object recognition
— the next step of computer vision objects classification allowing to perceive distinctive properties of an object and apply semantic attributes - for instance, to identify an apple, taking shape, texture or color properties of an object into account. Same time, the system responsible for objects recognition binds the target object with the surrounding ones and has an ability to “understand” the purpose of an object and “remember” its previous attempts of perception. The object recognized is distinguished visually from the source image for the sake of clarity.
Object tracking
— the process of consecutive moving object location in the FOV (Field of View) of a video capturing device by frame-by-frame video stream analysis.
The main purpose is to match source object locations, taken from the sequence of frames, while the object itself is moving fast relative to frame rate. Tracking systems build model which describes object movement pattern which is used to predict the location according to observations already made - in order to solve this task. It is widely used in security, communication and video surveillance systems, traffic flow control systems and other ITS’s.
(OCR) Optical Character Recognition
— a process of transforming digital images of typewritten, printed and handwritten texts into digital text data (a sequence of character codes) for their further editing and analysis. Various sources of information can be used within this process: scanned documents, photo and video clips as well as live video stream.
The ultimate purpose of the process can vary from cognitive computing, machine translation and text analysis to some specific computer vision problems: object detection, classification and recognition.
Precision
— the proportion of correctly identified objects among the total number of objects predicted (i.e. the ratio of the number of true positive to sum of true positive and false positive results). The measure of precision tells how many true positive results are actually correct, but cannot provide the information about the amount of truly negative results given by recognition algorithm.
Radial distortion
— the most common type of optical distortions caused by shooting lens, which is named after characteristic radial symmetry in the distortion structure.
There are several kinds of radial distortion:
- negative (“barrel” distortion):
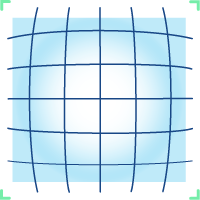
Image scale decreases along the distance from optical axis, the image distorted looks as if it was applied to the sphere or barrel. This type of distortion can be used for practical purposes - for getting hemispherical shots with “fisheye” lens. When using a lens with variable focal length value, “barrel” distortion is starting to appear in the middle part of focal length range and increases as it approaches to the wide-angle side of the range.
- positive (“pincushion” distortion):
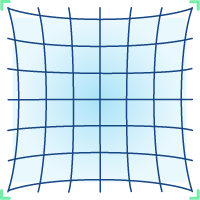
Image scale increases along the distance from optical axis so the lines which do not pass through the center of an image are bent inward, toward the center of an image - making it look like a pincushion.
- “moustache” distortion:
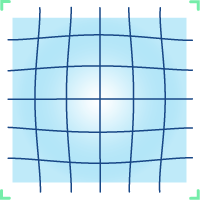
A combination of barrel (closer to the image center) and pincushion (toward the image sides) distortions. Horizontal lines on the upper of a frame look as slightly twisted up moustache (and “upside down” moustache in the lower half of a frame) as a result.
Research & Development
— a set of actions aimed at obtaining new knowledge and their practical application upon producing a new product, device or technology. Usually include the following stages:
- Research actions of theoretical or experimental nature, to determine technical feasibility of creating a new technology in a certain time frame.
- Experimental design and technological steps for the development of design and technological documentation for a prototype, as well as testing product prototype according to a technical task.
Recognition accuracy
— a measure of the recognition algorithm (or engine) quality assessment, usually evaluated by the following formula: F = 2 * ((Precision * Recall) / (Precision + Recall)). The PRECISION and RECALL metrics are used to provide exhausted set of algorithm characteristics: Recall demonstrates the ability to detect a certain class in general, while Precision - the ability to distinguish the class from another ones. Recognition Accuracy reflects the balance between the Precision metric (which reduction makes algorithm more “optimistic” and increases number of false positive results) and Recall metric (which reduction increases the count of “rejected” true positive results).
Below the illustration of the “contribution” of the metrics:

Recall
— the proportion of correctly identified objects among the total number of all objects actually displayed on an image (i.e. the ratio of the number of true positive to sum of true positive and true negative results). The measure of recall reflects an ability of an algorithm (or some recognition tool) to “predict” as many positive results as possible, but does not assess the proportion of possible false positive results.
Rolling shutter (the Progressive Shutter term is also in use)
— a method of image getting when a single frame is formed not entirely at once but taken progressively from the forming matrix. The opposite if the “full-frame shutter” (Global Shutter) which forms a frame instantly, but concedes to Rolling Shutter in the field of final image quality. The Rolling Shutter technology is used widely in devices equipped with CMOS matrix (complementary metal-oxide semiconductor structure), whose advantages overlap disadvantages this technology completely.
Images obtained in this way are distorted since an object is displaced relative to photo or video device during the complete information reading from all rows of the matrix, i.e. different parts of an object are spaced apart. The main way to fix such kind of distortions is to apply post-processing to a photo and video material within specialized editors.
An alternative to CMOS matrix could be charge-coupled devices (CCDs): they perform operations of moving objects registration (which have recognition marks like identification numbers on railway carriages) much more efficiently due to higher sensitivity, allowing to get rid of image artifacts. However, high cost is the main disadvantage of CCDs.
SDK (Software Development Kit)
— a set of interfaces and libraries which is used by software developers for creating applications targeted upon certain software package, operating system or a hardware platform. SDK significantly reduces integration time between systems that differ by including code examples and technical documentation and having all the advantages of each platform.
UIC (Union Internationale des Chemins de fer fr, International Union of Railways en)
— an international organization (established 20th of October, 1922), which unites national railway companies in order to solve problems in the area of railway transport development in collaboration, as well as to unify procedures and harmonize relationship among the European countries - members of international railway transportation system. Consists of about 199 representatives from all the five continents with railway connections nowadays.
Wagon CIS Number Recognition (Wagon CIS Code Recognition)
— a technology recognition of the rolling stock (produced in FSU countries) identification numbers conforming to the standard used in the former Soviet Union countries (1,520 mm / 4 ft 11 27⁄32 in gauge), used by Intlab Wagon SDK.
Wagon UIC Number Recognition (Wagon UIC Code Recognition)
— a technology recognition of the rolling stock identification numbers conforming to the UIC standard where is used (1,435 mm / 4 ft 8 1/2 in) gauge, used by Intlab UIC SDK.